In this 4th post of my series on Deep Learning from first principles in Python, R and Octave – Part 4, I explore the details of creating a multi-class classifier using the Softmax activation unit in a neural network. The earlier posts in this series were
1. Deep Learning from first principles in Python, R and Octave – Part 1. In this post I implemented logistic regression as a simple Neural Network in vectorized Python, R and Octave
2. Deep Learning from first principles in Python, R and Octave – Part 2. This 2nd part implemented the most elementary neural network with 1 hidden layer and any number of activation units in the hidden layer with sigmoid activation at the output layer
3. Deep Learning from first principles in Python, R and Octave – Part 3. The 3rd implemented a multi-layer Deep Learning network with an arbitrary number if hidden layers and activation units per hidden layer. The output layer was for binary classification which was based on the sigmoid unit. This multi-layer deep network was implemented in vectorized Python, R and Octave.
 Checkout my book ‘Deep Learning from first principles: Second Edition – In vectorized Python, R and Octave’. My book starts with the implementation of a simple 2-layer Neural Network and works its way to a generic L-Layer Deep Learning Network, with all the bells and whistles. The derivations have been discussed in detail. The code has been extensively commented and included in its entirety in the Appendix sections. My book is available on Amazon as paperback ($18.99) and in kindle version($9.99/Rs449).
Checkout my book ‘Deep Learning from first principles: Second Edition – In vectorized Python, R and Octave’. My book starts with the implementation of a simple 2-layer Neural Network and works its way to a generic L-Layer Deep Learning Network, with all the bells and whistles. The derivations have been discussed in detail. The code has been extensively commented and included in its entirety in the Appendix sections. My book is available on Amazon as paperback ($18.99) and in kindle version($9.99/Rs449).
You can download the PDF version of this book from Github at https://github.com/tvganesh/DeepLearningBook-2ndEd
This 4th part takes a swing at multi-class classification and uses the Softmax as the activation unit in the output layer. Inclusion of the Softmax activation unit in the activation layer requires us to compute the derivative of Softmax, or rather the “Jacobian” of the Softmax function, besides also computing the log loss for this Softmax activation during back propagation. Since the derivation of the Jacobian of a Softmax and the computation of the Cross Entropy/log loss is very involved, I have implemented a basic neural network with just 1 hidden layer with the Softmax activation at the output layer. I also perform multi-class classification based on the ‘spiral’ data set from CS231n Convolutional Neural Networks Stanford course, to test the performance and correctness of the implementations in Python, R and Octave. You can clone download the code for the Python, R and Octave implementations from Github at Deep Learning – Part 4
Note: A detailed discussion of the derivation below can also be seen in my video presentation Neural Networks 5
The Softmax function takes an N dimensional vector as input and generates a N dimensional vector as output.
The Softmax function is given by
There is a probabilistic interpretation of the Softmax, since the sum of the Softmax values of a set of vectors will always add up to 1, given that each Softmax value is divided by the total of all values.

As mentioned earlier, the Softmax takes a vector input and returns a vector of outputs. For e.g. the Softmax of a vector a=[1, 3, 6] is another vector S=[0.0063,0.0471,0.9464]. Notice that vector output is proportional to the input vector. Also, taking the derivative of a vector by another vector, is known as the Jacobian. By the way, The Matrix Calculus You Need For Deep Learning by Terence Parr and Jeremy Howard, is very good paper that distills all the main mathematical concepts for Deep Learning in one place.
Let us take a simple 2 layered neural network with just 2 activation units in the hidden layer is shown below

and
where g'() is the activation unit in the hidden layer which can be a relu, sigmoid or a
tanh function




Note: The superscript denotes the layer. The above denotes the equation for layer 1
of the neural network. For layer 2 with the Softmax activation, the equations are
and
where S() is the Softmax activation function






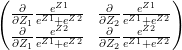
The Jacobian of the softmax ‘S’ is given by

Now the ‘division-rule’ of derivatives is as follows. If u and v are functions of x, then
Using this to compute each element of the above Jacobian matrix, we see that
when i=j we have
and when
This is of the general form
and

Note: Since the Softmax essentially gives the probability the following
notation is also used
and
If you throw the “Kronecker delta” into the equation, then the above equations can be expressed even more concisely as
where 






This reduces the Jacobian of the simple 2 output softmax vectors equation (A) as
The loss of Softmax is given by
For the 2 valued Softmax output this is
Using the chain rule we can write

and

In expanded form this is
Also
Therefore
Since

and

which simplifies to
Since
Similarly
In general this is of the form
For e.g if the probabilities computed were p=[0.1, 0.7, 0.2] then this implies that the class with probability 0.7 is the likely class. This would imply that the ‘One hot encoding’ for yi would be yi=[0,1,0] therefore the gradient pi-yi = [0.1,-0.3,0.2]















<strong>Note: Further, we could extend this derivation for a Softmax activation output that outputs 3 classes

We could derive

Interestingly, despite the lengthy derivations the final result is simple and intuitive!


As seen in my post ‘Deep Learning from first principles with Python, R and Octave – Part 3 the key equations for forward and backward propagation are

Forward propagation equations layer 1

Forward propagation equations layer 1



Using the result (A) in the back propagation equations below we have
Backward propagation equations layer 2
Backward propagation equations layer 1





2.0 Spiral data set
As I mentioned earlier, I will be using the ‘spiral’ data from CS231n Convolutional Neural Networks to ensure that my vectorized implementations in Python, R and Octave are correct. Here is the ‘spiral’ data set.
import numpy as np
import matplotlib.pyplot as plt
import os
os.chdir("C:/junk/dl-4/dl-4")
exec(open("././DLfunctions41.py").read())
# Create an input data set - Taken from CS231n Convolutional Neural networks
# http://cs231n.github.io/neural-networks-case-study/
N = 100 # number of points per class
D = 2 # dimensionality
K = 3 # number of classes
X = np.zeros((N*K,D)) # data matrix (each row = single example)
y = np.zeros(N*K, dtype='uint8') # class labels
for j in range(K):
ix = range(N*j,N*(j+1))
r = np.linspace(0.0,1,N) # radius
t = np.linspace(j*4,(j+1)*4,N) + np.random.randn(N)*0.2 # theta
X[ix] = np.c_[r*np.sin(t), r*np.cos(t)]
y[ix] = j
# Plot the data
plt.scatter(X[:, 0], X[:, 1], c=y, s=40, cmap=plt.cm.Spectral)
plt.savefig("fig1.png", bbox_inches='tight')
The implementations of the vectorized Python, R and Octave code are shown diagrammatically below

2.1 Multi-class classification with Softmax – Python code
A simple 2 layer Neural network with a single hidden layer , with 100 Relu activation units in the hidden layer and the Softmax activation unit in the output layer is used for multi-class classification. This Deep Learning Network, plots the non-linear boundary of the 3 classes as shown below
import numpy as np
import matplotlib.pyplot as plt
import os
os.chdir("C:/junk/dl-4/dl-4")
exec(open("././DLfunctions41.py").read())
# Read the input data
N = 100 # number of points per class
D = 2 # dimensionality
K = 3 # number of classes
X = np.zeros((N*K,D)) # data matrix (each row = single example)
y = np.zeros(N*K, dtype='uint8') # class labels
for j in range(K):
ix = range(N*j,N*(j+1))
r = np.linspace(0.0,1,N) # radius
t = np.linspace(j*4,(j+1)*4,N) + np.random.randn(N)*0.2 # theta
X[ix] = np.c_[r*np.sin(t), r*np.cos(t)]
y[ix] = j
# Set the number of features, hidden units in hidden layer and number of classess
numHidden=100 # No of hidden units in hidden layer
numFeats= 2 # dimensionality
numOutput = 3 # number of classes
# Initialize the model
parameters=initializeModel(numFeats,numHidden,numOutput)
W1= parameters['W1']
b1= parameters['b1']
W2= parameters['W2']
b2= parameters['b2']
# Set the learning rate
learningRate=0.6
# Initialize losses
losses=[]
# Perform Gradient descent
for i in range(10000):
# Forward propagation through hidden layer with Relu units
A1,cache1= layerActivationForward(X.T,W1,b1,'relu')
# Forward propagation through output layer with Softmax
A2,cache2 = layerActivationForward(A1,W2,b2,'softmax')
# No of training examples
numTraining = X.shape[0]
# Compute log probs. Take the log prob of correct class based on output y
correct_logprobs = -np.log(A2[range(numTraining),y])
# Conpute loss
loss = np.sum(correct_logprobs)/numTraining
# Print the loss
if i % 1000 == 0:
print("iteration %d: loss %f" % (i, loss))
losses.append(loss)
dA=0
# Backward propagation through output layer with Softmax
dA1,dW2,db2 = layerActivationBackward(dA, cache2, y, activationFunc='softmax')
# Backward propagation through hidden layer with Relu unit
dA0,dW1,db1 = layerActivationBackward(dA1.T, cache1, y, activationFunc='relu')
#Update paramaters with the learning rate
W1 += -learningRate * dW1
b1 += -learningRate * db1
W2 += -learningRate * dW2.T
b2 += -learningRate * db2.T
#Plot losses vs iterations
i=np.arange(0,10000,1000)
plt.plot(i,losses)
plt.xlabel('Iterations')
plt.ylabel('Loss')
plt.title('Losses vs Iterations')
plt.savefig("fig2.png", bbox="tight")
#Compute the multi-class Confusion Matrix
from sklearn.metrics import confusion_matrix
from sklearn.metrics import accuracy_score, precision_score, recall_score, f1_score
# We need to determine the predicted values from the learnt data
# Forward propagation through hidden layer with Relu units
A1,cache1= layerActivationForward(X.T,W1,b1,'relu')
# Forward propagation through output layer with Softmax
A2,cache2 = layerActivationForward(A1,W2,b2,'softmax')
#Compute predicted values from weights and biases
yhat=np.argmax(A2, axis=1)
a=confusion_matrix(y.T,yhat.T)
print("Multi-class Confusion Matrix")
print(a)## iteration 0: loss 1.098507
## iteration 1000: loss 0.214611
## iteration 2000: loss 0.043622
## iteration 3000: loss 0.032525
## iteration 4000: loss 0.025108
## iteration 5000: loss 0.021365
## iteration 6000: loss 0.019046
## iteration 7000: loss 0.017475
## iteration 8000: loss 0.016359
## iteration 9000: loss 0.015703
## Multi-class Confusion Matrix
## [[ 99 1 0]
## [ 0 100 0]
## [ 0 1 99]]

Check out my compact and minimal book “Practical Machine Learning with R and Python:Second edition- Machine Learning in stereo” available in Amazon in paperback($10.99) and kindle($7.99) versions. My book includes implementations of key ML algorithms and associated measures and metrics. The book is ideal for anybody who is familiar with the concepts and would like a quick reference to the different ML algorithms that can be applied to problems and how to select the best model. Pick your copy today!!

2.2 Multi-class classification with Softmax – R code
The spiral data set created with Python was saved, and is used as the input with R code. The R Neural Network seems to perform much,much slower than both Python and Octave. Not sure why! Incidentally the computation of loss and the softmax derivative are identical for both R and Octave. yet R is much slower. To compute the softmax derivative I create matrices for the One Hot Encoded yi and then stack them before subtracting pi-yi. I am sure there is a more elegant and more efficient way to do this, much like Python. Any suggestions?
library(ggplot2)
library(dplyr)
library(RColorBrewer)source("DLfunctions41.R")
# Read the spiral dataset
Z <- as.matrix(read.csv("spiral.csv",header=FALSE))
Z1=data.frame(Z)
#Plot the dataset
ggplot(Z1,aes(x=V1,y=V2,col=V3)) +geom_point() +
scale_colour_gradientn(colours = brewer.pal(10, "Spectral"))
# Setup the data
X <- Z[,1:2]
y <- Z[,3]
X1 <- t(X)
Y1 <- t(y)
# Initialize number of features, number of hidden units in hidden layer and
# number of classes
numFeats<-2 # No features
numHidden<-100 # No of hidden units
numOutput<-3 # No of classes
# Initialize model
parameters <-initializeModel(numFeats, numHidden,numOutput)
W1 <-parameters[['W1']]
b1 <-parameters[['b1']]
W2 <-parameters[['W2']]
b2 <-parameters[['b2']]
# Set the learning rate
learningRate <- 0.5
# Initialize losses
losses <- NULL
# Perform gradient descent
for(i in 0:9000){
# Forward propagation through hidden layer with Relu units
retvals <- layerActivationForward(X1,W1,b1,'relu')
A1 <- retvals[['A']]
cache1 <- retvals[['cache']]
forward_cache1 <- cache1[['forward_cache1']]
activation_cache <- cache1[['activation_cache']]
# Forward propagation through output layer with Softmax units
retvals = layerActivationForward(A1,W2,b2,'softmax')
A2 <- retvals[['A']]
cache2 <- retvals[['cache']]
forward_cache2 <- cache2[['forward_cache1']]
activation_cache2 <- cache2[['activation_cache']]
# No oftraining examples
numTraining <- dim(X)[1]
dA <-0
# Select the elements where the y values are 0, 1 or 2 and make a vector
a=c(A2[y==0,1],A2[y==1,2],A2[y==2,3])
# Take log
correct_probs = -log(a)
# Compute loss
loss= sum(correct_probs)/numTraining
if(i %% 1000 == 0){
sprintf("iteration %d: loss %f",i, loss)
print(loss)
}
# Backward propagation through output layer with Softmax units
retvals = layerActivationBackward(dA, cache2, y, activationFunc='softmax')
dA1 = retvals[['dA_prev']]
dW2= retvals[['dW']]
db2= retvals[['db']]
# Backward propagation through hidden layer with Relu units
retvals = layerActivationBackward(t(dA1), cache1, y, activationFunc='relu')
dA0 = retvals[['dA_prev']]
dW1= retvals[['dW']]
db1= retvals[['db']]
# Update parameters
W1 <- W1 - learningRate * dW1
b1 <- b1 - learningRate * db1
W2 <- W2 - learningRate * t(dW2)
b2 <- b2 - learningRate * t(db2)
}## [1] 1.212487
## [1] 0.5740867
## [1] 0.4048824
## [1] 0.3561941
## [1] 0.2509576
## [1] 0.7351063
## [1] 0.2066114
## [1] 0.2065875
## [1] 0.2151943
## [1] 0.1318807#Create iterations
iterations <- seq(0,10)
#df=data.frame(iterations,losses)
ggplot(df,aes(x=iterations,y=losses)) + geom_point() + geom_line(color="blue") +
ggtitle("Losses vs iterations") + xlab("Iterations") + ylab("Loss")
plotDecisionBoundary(Z,W1,b1,W2,b2)

Multi-class Confusion Matrix
library(caret)
library(e1071)
# Forward propagation through hidden layer with Relu units
retvals <- layerActivationForward(X1,W1,b1,'relu')
A1 <- retvals[['A']]
# Forward propagation through output layer with Softmax units
retvals = layerActivationForward(A1,W2,b2,'softmax')
A2 <- retvals[['A']]
yhat <- apply(A2, 1,which.max) -1
Confusion Matrix and Statistics
Reference
Prediction 0 1 2
0 97 0 1
1 2 96 4
2 1 4 95
Overall Statistics
Accuracy : 0.96
95% CI : (0.9312, 0.9792)
No Information Rate : 0.3333
P-Value [Acc > NIR] : <2e-16
Kappa : 0.94
Mcnemar's Test P-Value : 0.5724
Statistics by Class:
Class: 0 Class: 1 Class: 2
Sensitivity 0.9700 0.9600 0.9500
Specificity 0.9950 0.9700 0.9750
Pos Pred Value 0.9898 0.9412 0.9500
Neg Pred Value 0.9851 0.9798 0.9750
Prevalence 0.3333 0.3333 0.3333
Detection Rate 0.3233 0.3200 0.3167
Detection Prevalence 0.3267 0.3400 0.3333
Balanced Accuracy 0.9825 0.9650 0.9625
My book “Practical Machine Learning with R and Python” includes the implementation for many Machine Learning algorithms and associated metrics. Pick up your copy today!
2.3 Multi-class classification with Softmax – Octave code
A 2 layer Neural network with the Softmax activation unit in the output layer is constructed in Octave. The same spiral data set is used for Octave also
source("DL41functions.m")
# Read the spiral data
data=csvread("spiral.csv");
# Setup the data
X=data(:,1:2);
Y=data(:,3);
# Set the number of features, number of hidden units in hidden layer and number of classes
numFeats=2; #No features
numHidden=100; # No of hidden units
numOutput=3; # No of classes
# Initialize model
[W1 b1 W2 b2] = initializeModel(numFeats,numHidden,numOutput);
# Initialize losses
losses=[]
#Initialize learningRate
learningRate=0.5;
for k =1:10000
# Forward propagation through hidden layer with Relu units
[A1,cache1 activation_cache1]= layerActivationForward(X',W1,b1,activationFunc ='relu');
# Forward propagation through output layer with Softmax units
[A2,cache2 activation_cache2] =
layerActivationForward(A1,W2,b2,activationFunc='softmax');
# No of training examples
numTraining = size(X)(1);
# Select rows where Y=0,1,and 2 and concatenate to a long vector
a=[A2(Y==0,1) ;A2(Y==1,2) ;A2(Y==2,3)];
#Select the correct column for log prob
correct_probs = -log(a);
#Compute log loss
loss= sum(correct_probs)/numTraining;
if(mod(k,1000) == 0)
disp(loss);
losses=[losses loss];
endif
dA=0;
# Backward propagation through output layer with Softmax units
[dA1 dW2 db2] = layerActivationBackward(dA, cache2, activation_cache2,Y,activationFunc='softmax');
# Backward propagation through hidden layer with Relu units
[dA0,dW1,db1] = layerActivationBackward(dA1', cache1, activation_cache1, Y, activationFunc='relu');
#Update parameters
W1 += -learningRate * dW1;
b1 += -learningRate * db1;
W2 += -learningRate * dW2';
b2 += -learningRate * db2';
endfor
# Plot Losses vs Iterations
iterations=0:1000:9000
plotCostVsIterations(iterations,losses)
# Plot the decision boundary
plotDecisionBoundary( X,Y,W1,b1,W2,b2)


The code for the Python, R and Octave implementations can be downloaded from Github at Deep Learning – Part 4
Conclusion
In this post I have implemented a 2 layer Neural Network with the Softmax classifier. In Part 3, I implemented a multi-layer Deep Learning Network. I intend to include the Softmax activation unit into the generalized multi-layer Deep Network along with the other activation units of sigmoid,tanh and relu.
Stick around, I’ll be back!!
Watch this space!
References
1. Deep Learning Specialization
2. Neural Networks for Machine Learning
3. CS231 Convolutional Neural Networks for Visual Recognition
4. Eli Bendersky’s Website – The Softmax function and its derivative
5. Cross Validated – Backpropagation with Softmax / Cross Entropy
6. Stackoverflow – CS231n: How to calculate gradient for Softmax loss function?
7. Math Stack Exchange – Derivative of Softmax
8. The Matrix Calculus for Deep Learning
You may like
1.My book ‘Practical Machine Learning with R and Python’ on Amazon
2. My travels through the realms of Data Science, Machine Learning, Deep Learning and (AI)
3. Deblurring with OpenCV: Weiner filter reloaded
4. A method to crowd source pothole marking on (Indian) roads
5. Rock N’ Roll with Bluemix, Cloudant & NodeExpress
6. Sea shells on the seashore
7. Design Principles of Scalable, Distributed Systems
To see all post click Index of posts


 and
and 
 and
and 


 . It can be shown that
. It can be shown that see equation 2 in
see equation 2 in  see equation (f) in
see equation (f) in  because
because  -(1a)
-(1a) -(1b)
-(1b) -(1c)
-(1c)
 -(1d)
-(1d)
 – (2a)
– (2a) – (2b)
– (2b) – (2c)
– (2c) – (2d)
– (2d) and
and 




 = a g’(z) = a(1-a) – See
= a g’(z) = a(1-a) – See 
 , …
, … ![v_{L-1}]](https://s0.wp.com/latex.php?latex=v_%7BL-1%7D%5D&bg=ffffff&fg=000000&s=0&c=20201002)
 , …
, … 
 …
… ![v_{L}]](https://s0.wp.com/latex.php?latex=v_%7BL%7D%5D&bg=ffffff&fg=000000&s=0&c=20201002)
 is the number of activation units in each hidden layer, which is specified while actually executing the Deep Learning network using the function L_Layer_DeepModel(), in all the implementations Python, R and Octave
is the number of activation units in each hidden layer, which is specified while actually executing the Deep Learning network using the function L_Layer_DeepModel(), in all the implementations Python, R and Octave











 =
= 































 and
and  -(a) and
-(a) and and
and 
 and
and  (b)
(b) -(c)
-(c) and using (b) we get
and using (b) we get


 -(d)
-(d)

 see
see 









 -(A)
-(A) -(B)
-(B)

 -(C)
-(C)
 -(D)
-(D) – From (C)
– From (C) – From (D)
– From (D) – From (A)
– From (A) – From (B)
– From (B)





















 (1)
(1)

 then
then




 -(2)
-(2) -(a)
-(a) -(b)
-(b) -(c)
-(c) and
and  . In the case of regression it would be
. In the case of regression it would be  and
and  where dE is the Mean Squared Error function.
where dE is the Mean Squared Error function. -(d)
-(d)
 – (e)
– (e)
 (f)
(f) -(g)
-(g) – (h)
– (h)
 -(i)
-(i) -(j)
-(j) and using (f) in (j)
and using (f) in (j)
 and
and 


















 -(A)
-(A)








 for each weight
for each weight  . This is shown below
. This is shown below

 -(B)
-(B)
![\partial E _{total}/\partial out_{o1} = \partial /\partial _{out_{o1}}[1/2(target_{01}-out_{01})^{2}- 1/2(target_{02}-out_{02})^{2}]](https://s0.wp.com/latex.php?latex=%C2%A0%5Cpartial+E+_%7Btotal%7D%2F%5Cpartial+out_%7Bo1%7D+%3D+%5Cpartial+%2F%5Cpartial+_%7Bout_%7Bo1%7D%7D%5B1%2F2%28target_%7B01%7D-out_%7B01%7D%29%5E%7B2%7D-+1%2F2%28target_%7B02%7D-out_%7B02%7D%29%5E%7B2%7D%5D&bg=ffffff&fg=000000&s=0&c=20201002)

![\partial out_{o1}/\partial in_{o1} = \partial/\partial in_{o1} [1/(1+e^{-in_{o1}})]](https://s0.wp.com/latex.php?latex=%5Cpartial+out_%7Bo1%7D%2F%5Cpartial+in_%7Bo1%7D+%3D+%5Cpartial%2F%5Cpartial+in_%7Bo1%7D+%5B1%2F%281%2Be%5E%7B-in_%7Bo1%7D%7D%29%5D&bg=ffffff&fg=000000&s=0&c=20201002)
![\partial out_{o1}/\partial in_{o1} = \partial/\partial in_{o1} [1/(1+e^{-in_{o1}})] = out_{o1}(1-out_{o1})](https://s0.wp.com/latex.php?latex=%C2%A0%5Cpartial+out_%7Bo1%7D%2F%5Cpartial+in_%7Bo1%7D+%3D+%5Cpartial%2F%5Cpartial+in_%7Bo1%7D+%5B1%2F%281%2Be%5E%7B-in_%7Bo1%7D%7D%29%5D+%3D+out_%7Bo1%7D%281-out_%7Bo1%7D%29&bg=ffffff&fg=000000&s=0&c=20201002)
![\partial in_{o1}/\partial w_{5} = \partial/\partial w_{5} [w_{5}*out_{h1} + w_{6}*out_{h2}] = out_{h1}](https://s0.wp.com/latex.php?latex=%C2%A0%5Cpartial+in_%7Bo1%7D%2F%5Cpartial+w_%7B5%7D+%3D+%5Cpartial%2F%5Cpartial+w_%7B5%7D+%5Bw_%7B5%7D%2Aout_%7Bh1%7D+%2B+w_%7B6%7D%2Aout_%7Bh2%7D%5D+%3D+out_%7Bh1%7D&bg=ffffff&fg=000000&s=0&c=20201002)

 , we now perform gradient descent, by computing a new weight, assuming a learning rate
, we now perform gradient descent, by computing a new weight, assuming a learning rate 

 we would get
we would get


 – (C)
– (C)
 -(D)
-(D)


 – (E)
– (E) – (F)
– (F)![\partial E_{total}/\partial w_{1} = -[(target_{o1}-out_{o1}) *out_{o1}(1-out_{o1})*w_{5} + (target_{o2}-out_{o2}) *out_{o2}(1-out_{o2})*w_{6}]*out_{h1}*(1-out_{h1})*i_{1}](https://s0.wp.com/latex.php?latex=%5Cpartial+E_%7Btotal%7D%2F%5Cpartial+w_%7B1%7D+%3D+-%5B%28target_%7Bo1%7D-out_%7Bo1%7D%29+%2Aout_%7Bo1%7D%281-out_%7Bo1%7D%29%2Aw_%7B5%7D+%2B+%28target_%7Bo2%7D-out_%7Bo2%7D%29+%2Aout_%7Bo2%7D%281-out_%7Bo2%7D%29%2Aw_%7B6%7D%5D%2Aout_%7Bh1%7D%2A%281-out_%7Bh1%7D%29%2Ai_%7B1%7D&bg=ffffff&fg=000000&s=0&c=20201002)
![\partial E_{total}/\partial w_{1} = -\sum_{i}[(target_{oi}-out_{oi}) *out_{oi}(1-out_{oi})*w_{j}]*out_{h1}*(1-out_{h1})*i_{1}](https://s0.wp.com/latex.php?latex=%5Cpartial+E_%7Btotal%7D%2F%5Cpartial+w_%7B1%7D+%3D+-%5Csum_%7Bi%7D%5B%28target_%7Boi%7D-out_%7Boi%7D%29+%2Aout_%7Boi%7D%281-out_%7Boi%7D%29%2Aw_%7Bj%7D%5D%2Aout_%7Bh1%7D%2A%281-out_%7Bh1%7D%29%2Ai_%7B1%7D&bg=ffffff&fg=000000&s=0&c=20201002)


![\partial E_{total}/\partial w_{k} = -\sum_{i}[(target_{oi}-out_{oi}) *out_{oi}(1-out_{oi})*w_{j}]*out_{hk}*(1-out_{hk})*i_{k}](https://s0.wp.com/latex.php?latex=%5Cpartial+E_%7Btotal%7D%2F%5Cpartial+w_%7Bk%7D+%3D+-%5Csum_%7Bi%7D%5B%28target_%7Boi%7D-out_%7Boi%7D%29+%2Aout_%7Boi%7D%281-out_%7Boi%7D%29%2Aw_%7Bj%7D%5D%2Aout_%7Bhk%7D%2A%281-out_%7Bhk%7D%29%2Ai_%7Bk%7D&bg=ffffff&fg=000000&s=0&c=20201002)